draft - 空間可視化における Gemini とGPT(チャピィ)の差

今回のRRX可視化で見えたのは、能力差というより
アウトプット設計パイプラインの違いだった。
Geminiの挙動(観測)
- 座標取得:できる
- 投影変換:できる(EPSG:3857など)
- 描画:できる
ただし流れは一貫して:
要求 → 最短実装 → 出力
結果として:
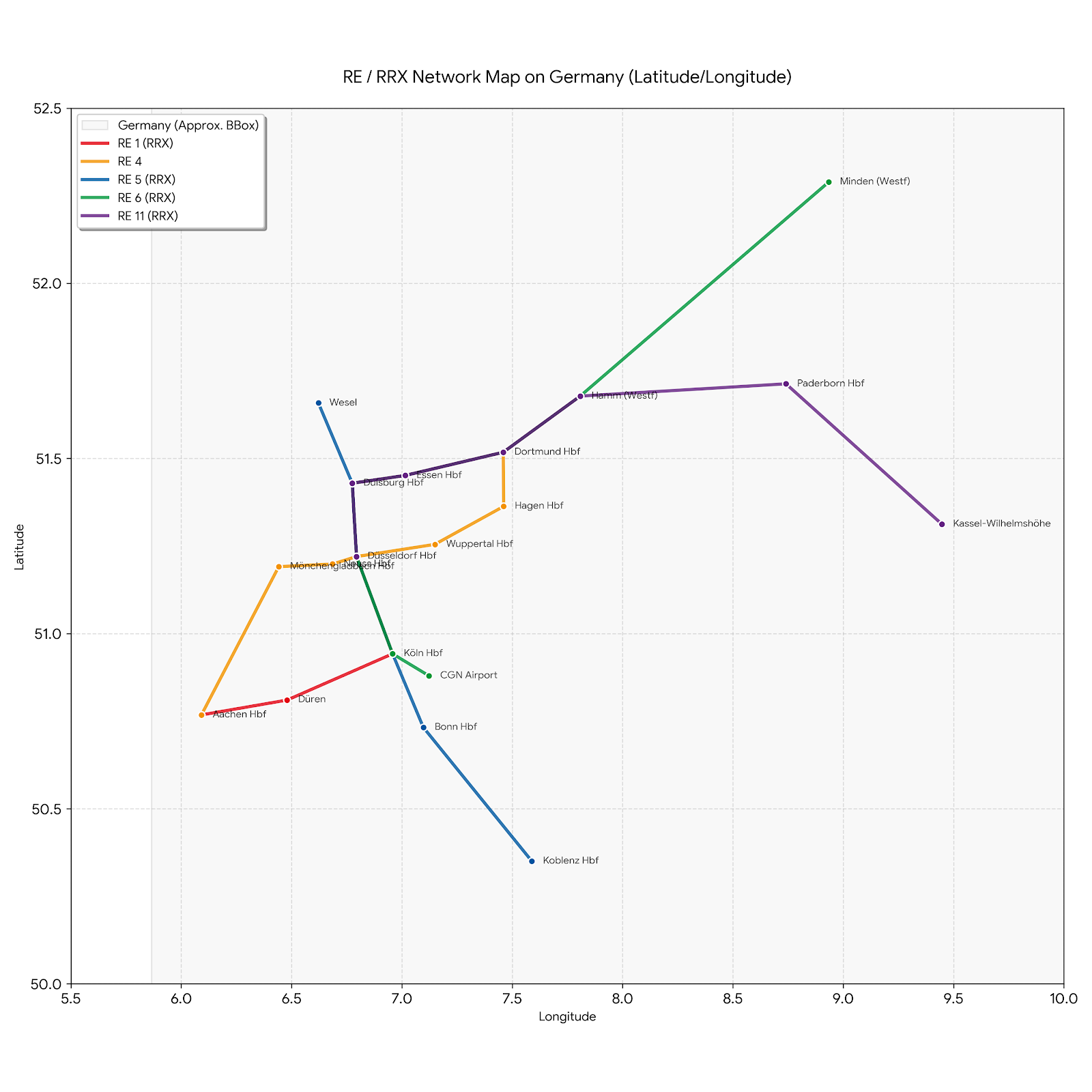
- 緯度経度プロット
- 投影座標のXY散布図
- Google Mapピン
など、
「技術的に正しいが、人間的に地図にならない」
アウトプットに落ち着く。
Geminiにとって:
- 座標 = データ
- 地図 = UI(Google Maps)
という扱いになっている。
チャピィ側の挙動
同じ要求に対して:
- 投影を入れる
- 国境ポリゴンを重ねる
- aspectを固定する
- 路線をレイヤとして重畳する
という
要求 → 人間の空間認知を想定 → 構造化 → 出力
の流れを踏む。
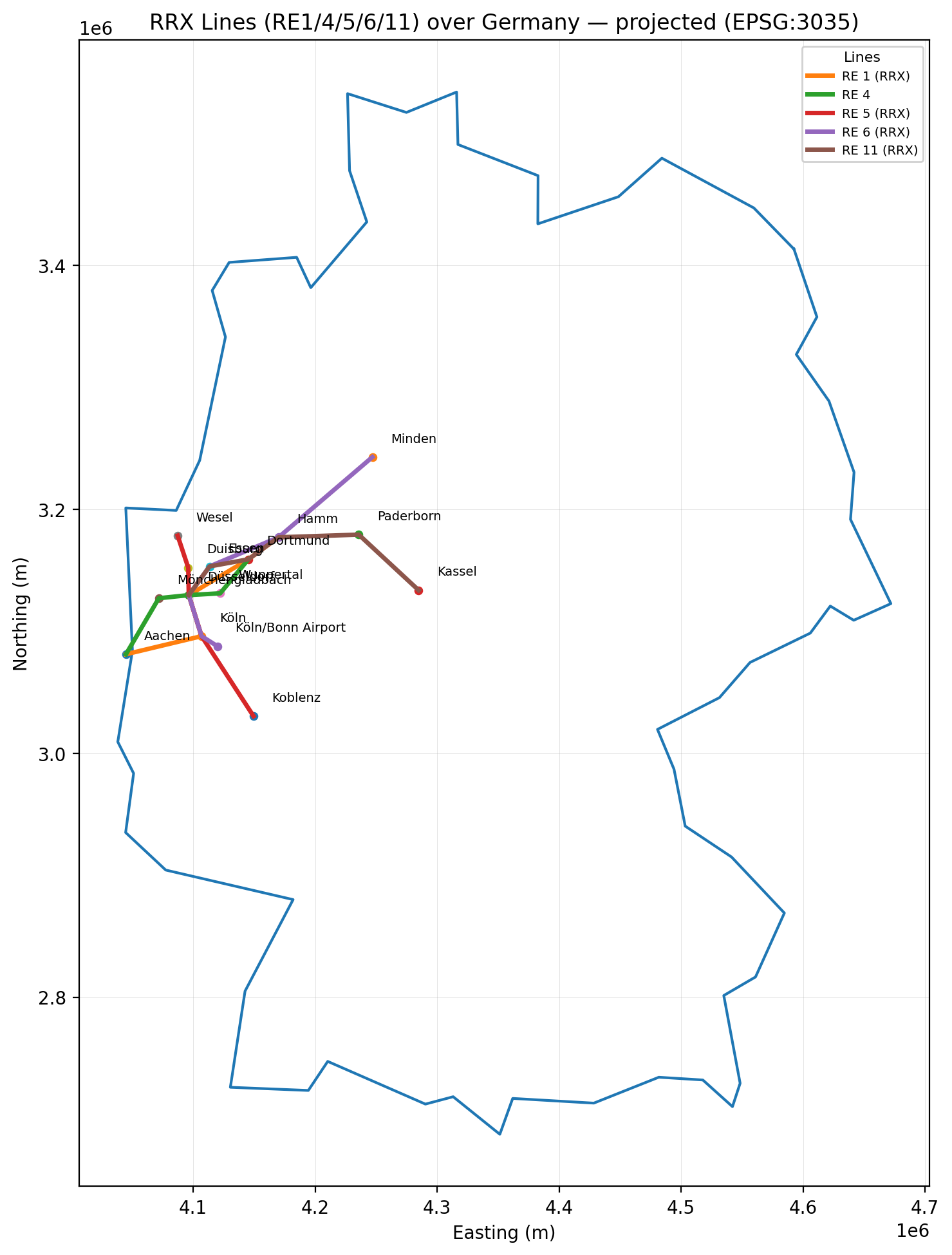
つまり:
- 座標 = 空間
- 地図 = 幾何構造+文脈
として扱っている。
決定的な差
Gemini:
正しく描いたか?
チャピィ:
人間に“地図”として伝わるか?
ここ。
Geminiは「計算タスクとして完結」
チャピィは「認知タスクとして完結」
面白い副産物
Geminiは最終的に:
- My Maps用CSV
- Google Mapピン
という実務導線を提示してきた。
これは
可視化を外部UIに逃がす
というGoogle的アプローチで、
実用面ではかなり強い。
一方チャピィは:
内部で構造を再構成して図を生成
研究・構造理解寄り。
暫定まとめ
これは優劣というより役割分化:
- Gemini:使わせるAI(UI連携・永続)
- チャピィ:考えさせるAI(構造化・空間再構成)
そしてユーザー側が
「構造図」と「実用マップ」を分けて使い始めた瞬間、
比較はAI性能ではなくワークフロー設計になった。
著:霧星礼知(min.k)/構造支援:ChatGPT GPT-5.2/AI-assisted / Structure observation