巡航モデルに第3軸を足す ── 「空間転移」という思考のワープ

以前、巡航モデルとして「高度(altitude)」と「速度(speed)」の2軸で思考状態を整理するモデルを書いた。
👉 https://www.mncc.info/cruise-model-second-axis-altitude-speed/
このモデルはかなり使い勝手がよかった。
どの高さで考えているか、どの速度で処理しているか——その2軸だけで、思考の質や状態をある程度クリアに説明できた。
ただ最近、自分のログを見返していて、どうしても説明しきれない挙動に気づいた。
それが 空間転移 と呼ぶことにした現象だ。
高度と速度では説明できない動き
巡航モデルの前提として、思考の変化は基本的に連続的だ。
高度が上下する、速度が増減する。どちらも「同じ空間の中での状態変化」として扱える。
だが実際には、こういう瞬間がある。
- 出力を見る(利用者の視点)
- 次の瞬間、AIの内部挙動を読んでいる
- さらに一瞬で、設計者として制約を組み直している
- またすぐ、出力を見る側に戻る
このとき、思考は滑らかに移動していない。
ワープしている。
高度が変わったわけでも、速度を上げたわけでもない。
そもそも「同じ空間」にいない。
空間転移とは何か
ここで定義したいのが:
空間転移(Spatial Transposition)
ある認知フレームから、別の認知フレームへ——
連続的な思考ステップを経ずに直接移動する現象。
単なるメタ認知ではない。
「自分を俯瞰する」ではなく、利用者空間・実装空間・設計空間といった、意味の異なる空間そのものを飛び越える動きだ。
感覚的には、階段でもエレベーターでもなく、いきなり別の建物に出現する感じに近い。
巡航モデルへの統合
これを巡航モデルに加えると、構造はこうなる。
従来:高度 × 速度
そこに 空間転移(spatial shift) を足す。
つまり 高度 × 速度 × 空間 の3軸。
高度と速度は「同一空間内の状態変化」。
空間転移は「空間そのものの切り替え」。
性質がまったく異なる。
なぜこれが必要か
高度と速度だけでは、以下の現象が説明できない。
- 問題空間をまたぐ突然の視点変更
- 出力評価から制約設計への即時ジャンプ
- 「ここを塞げばいい」という瞬間的発見
これらは、速く考えた結果でも、高い視点に立った結果でもない。
場所が変わっている。
プロンプト設計で見える典型例
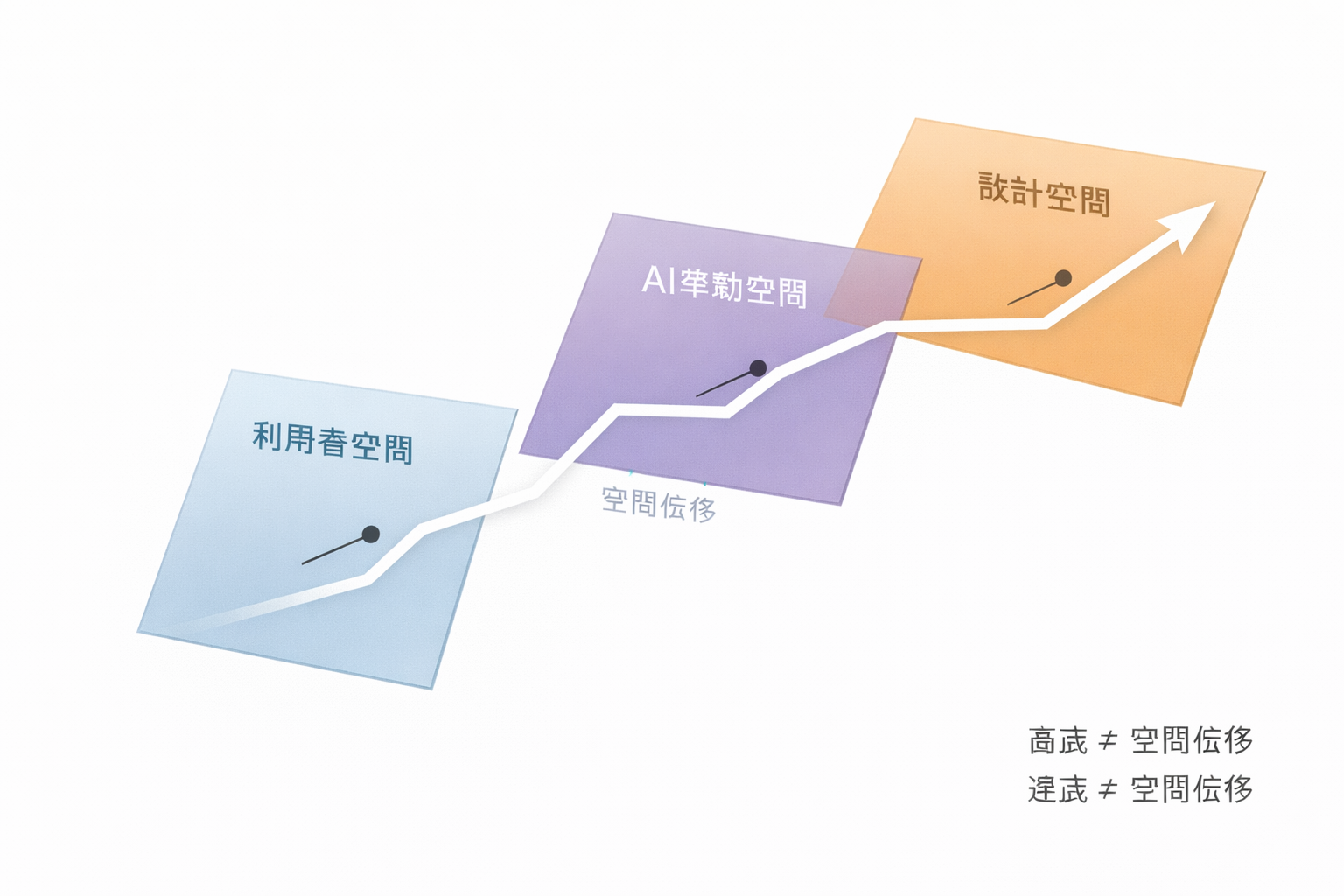
今回、地図描画のプロンプトを組んでいたときがわかりやすい例だった。
流れを分解するとこうなる。
- 出力を見る(利用者空間)
- AIの最短距離最適化を読む(AI挙動空間)
- 禁止条件を設計する(設計空間)
- また出力を見る(利用者空間)
これを数秒単位で往復していた。
高度変化でも速度変化でもなく、
空間転移の連続発生だ。
かなり特殊な能力
この空間転移を自然にやっている人は、正直あまり多くない。
多くの場合、
- 利用者視点に留まる
- 抽象論で止まる
- 改善案を仕様に落とせない
のどれかになる。空間を跨げない。
だから
「壊れた出力を見る」→「なぜそうなるか読む」→「どう塞ぐか設計する」
が一続きで起こらない。どこかで詰まる。
空間転移があると、この3ステップが途切れずに動く。
まとめ
巡航モデルは元々、高度と速度で思考状態を整理する枠組みだった。
そこに今回、空間転移という第3軸を加えた。
これはメタ認知の強化版でも、思考速度の話でもない。
意味空間そのものを飛び越える能力の話だ。
高度 × 速度 × 空間。
この3軸で見ると、人間とAIの協調設計や、プロンプト構造化、問題解決の質の差が、かなりクリアに見えてくる。
著:霧星礼知(min.k)/構造支援:ChatGPT GPT-5.2/AI-assisted / Structure observation